Training Models
Dataset preparation
Dataset preparation and Data Preprocess Section guide you through the step of how to prepare dataset be generating numpy array from raster image.
Model input
- Sentinel 2 + 1 stack image
- Multi-dimensional image numpy .npy format sampling from target raster, in this study we use [B1, B2, B3, B4, B5, B6, B7, B8, B8A, B9, B11, B12 , VV(ASC) , VH(ASC)]
- Support any resolution , but thing to consider that larger image require more computation and time cost while smaller image will likely to lost spatial information , in this study we use 244x244 px
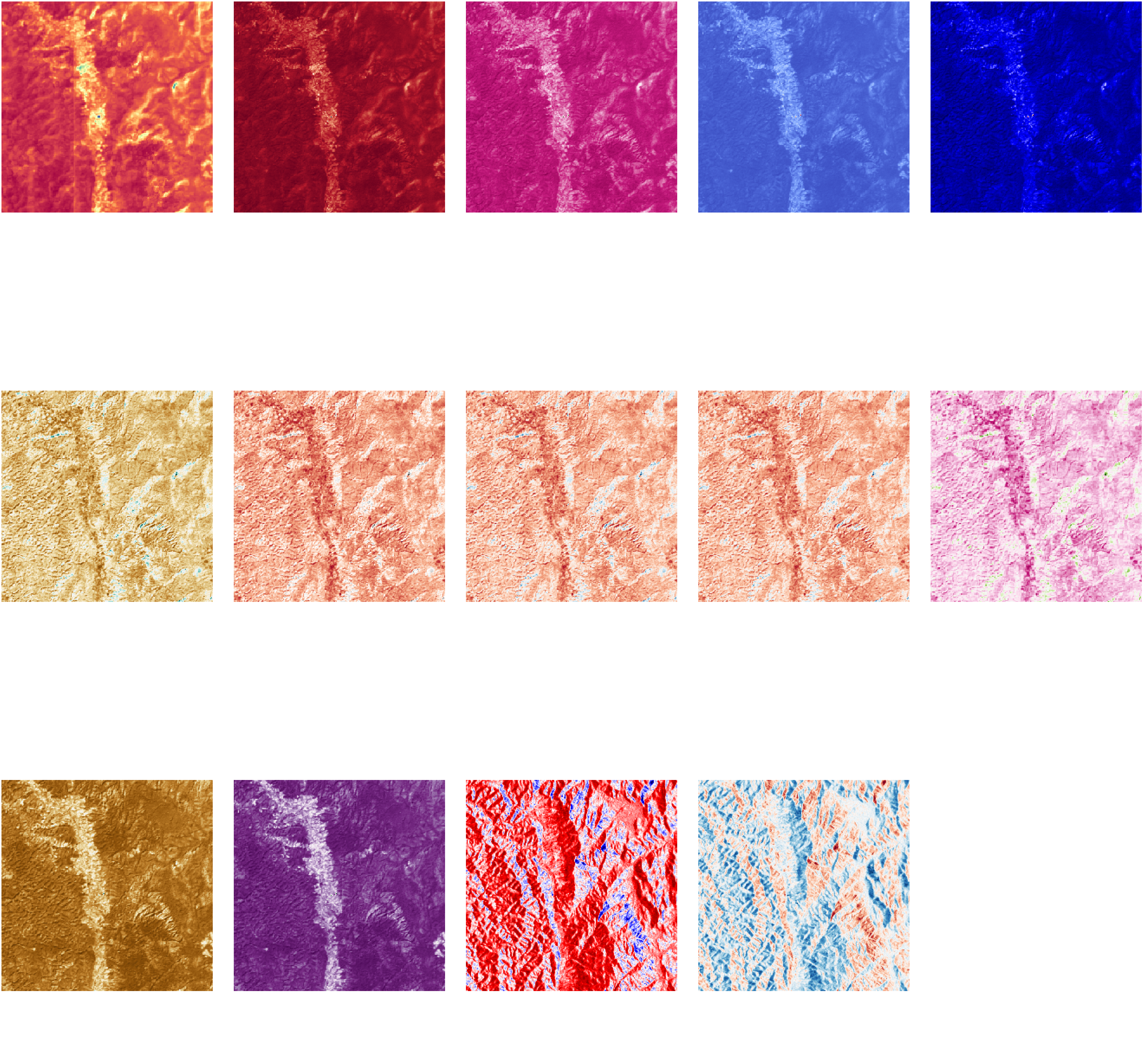
Figure : Example visualization of sampling data Sentinel 2 + 1 stack image [B1, B2, B3, B4, B5, B6, B7, B8, B8A, B9, B11, B12 , VV(ASC) , VH(ASC)]
Model Reference Ground truth
- GEDI rasterize sparse AGB/canopy height image
- 1 channel image numpy .npy format sampling from target raster, same area as model input.
- leave pixel that have no value as NAN
- Almost all pixel will be NAN value. That’s okay because of properties of sensor, GEDI has very sparse coverage measurement.
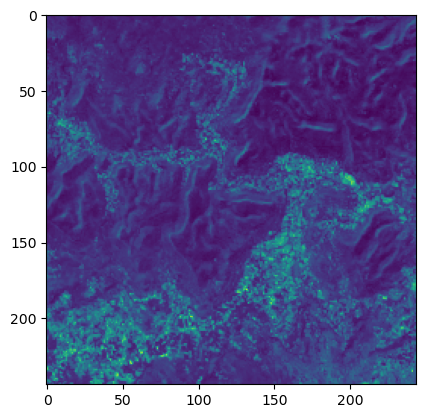
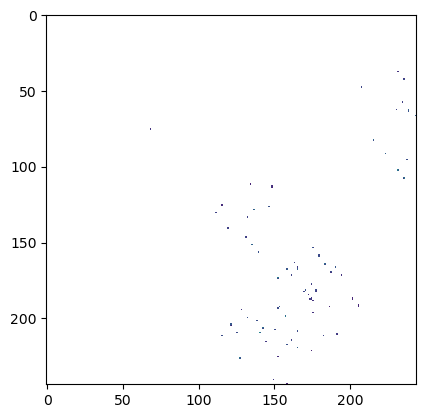
Figure : Example visualization pair of input Sentinel 2 + 1 stack image and GEDI ground truth , although GEDI has very limited data. We will use technique call sparse-supervison to train deep learning model.
Sparse supervision is take place during training step by only calculate only pixel that have numeric value
- in
trainer.py
# calculate on only with GEDI pixel that is not nan
predictions = predictions[~np.isnan(true_masks.detach().cpu().numpy())]
log_variances = log_variances[~np.isnan(true_masks.detach().cpu().numpy())]
true_masks = true_masks[~np.isnan(true_masks.detach().cpu().numpy())].float()Dataset Hierarchy
Make root folder for input and reference data seperately.
Keep trian/val/test in the same root directory.
Make sure to keep the same name for each instance input/groundtruth in train/val/test subset so pytorch dataloder can identify.
Example of dataset directory
Sentinel 1 , 2 Input
/[Input Dir Name]
/train
- abc.npy
...
/test
- def.npy
...
/val
- ijk.npy
...GEDI ground truth
/[GT Dir Name]
/train
- abc.npy
...
/test
- def.npy
...
/val
- ijk.npy
...Training
Prerequsite
- Pytorch
- torchsummary
- torchmetrics
- tqdm
- rasterio
- numpy
- matplotlib
- wandb
Training from scratch
- Set up wandb API key to record model evaluation metric
The training script use both tensorboard to store model evaluation result locally as well as WANDB
Tensorboard result is locate at /log dir at output directory
- After preparing dataset. Set up
WANDBAPI key as enviroment variable
export WANDB_API_KEY=[YOUR_WADB_API_KEY]- run
train.pyin/srcdirectory with required argument
python3 train.py [--train_input_data_dir TRAIN_DIR] [--train_label_data_dir GT_DIR] [--all_checkpoint_dir CKP_DIR]TRAIN_DIR specify root directory of train/validation/test of input image.
GT_DIR specify root directory of train/validation/test of reference image.
CKP_DIR specify root directory that keep all model weights in each epoch.
Additionally, you can specify optional argument to modify hyperameter of the training process
optional arguments:
-h, --help show this help message and exit
--out_dir output directory for the experiment , default='./tmp/'
--nb_epoch E Number of epochs , default=100
--batch_size B Batch size, default=32
--base_learning_rate BLR Initial learning rate, default=1e-7
--l2_lambda L2 L2 regularizer on weights hyperparameter, default=1e-8
--optimizer ['ADAM', 'SGD'] optimizer , default= 'ADAM'
--momentum MT momentum for SGD, default=0.9
--gradient_clipping G gradient_clipping, default=1.0
--amp [True , False] Use mixed precision , default = False
--bilinear [True , False] Use bilinear upsampling, default = True
--num_ch CH Number of input_channels, default=14
--save_checkpoint [True , False] Save weight every epoch? , default = True - After model finished training, model’s best weight (lowest validation error) is locate at path specify in
--out_diroptinal argument. Along with log and test result
If you don’t want to pass input,labe,checkpoint directory path as argument everytime. You can set as default parameter in src/utils/parset.py
In parser.py locate 3 parser argument to set default path.
parser.add_argument("--all_checkpoint_dir", required = True, help="all_checkpoint directory")
#dataset params
parser.add_argument("--train_input_data_dir", required = True , help="Training input data directory with folder train/test/val.")
parser.add_argument("--train_label_data_dir", required = True , help="Training label data directory with folder train/test/val.")Training from pre-trained weight
- use keyword
resumeto argument--train_modeand specify model checkpoint path with argument--model_weights_path
python3 train.py [--train_input_data_dir TRAIN_DIR] [--train_label_data_dir GT_DIR] [--all_checkpoint_dir CKP_DIR] [--model_weights_path MWP] [--train_mode 'resume']Note : --model_weights_path MWP path of model checkpoint include checkpoint itself eg; /path/to/checkpoint.pth
optional arguments hyperparameter can be adjust or remain the same.